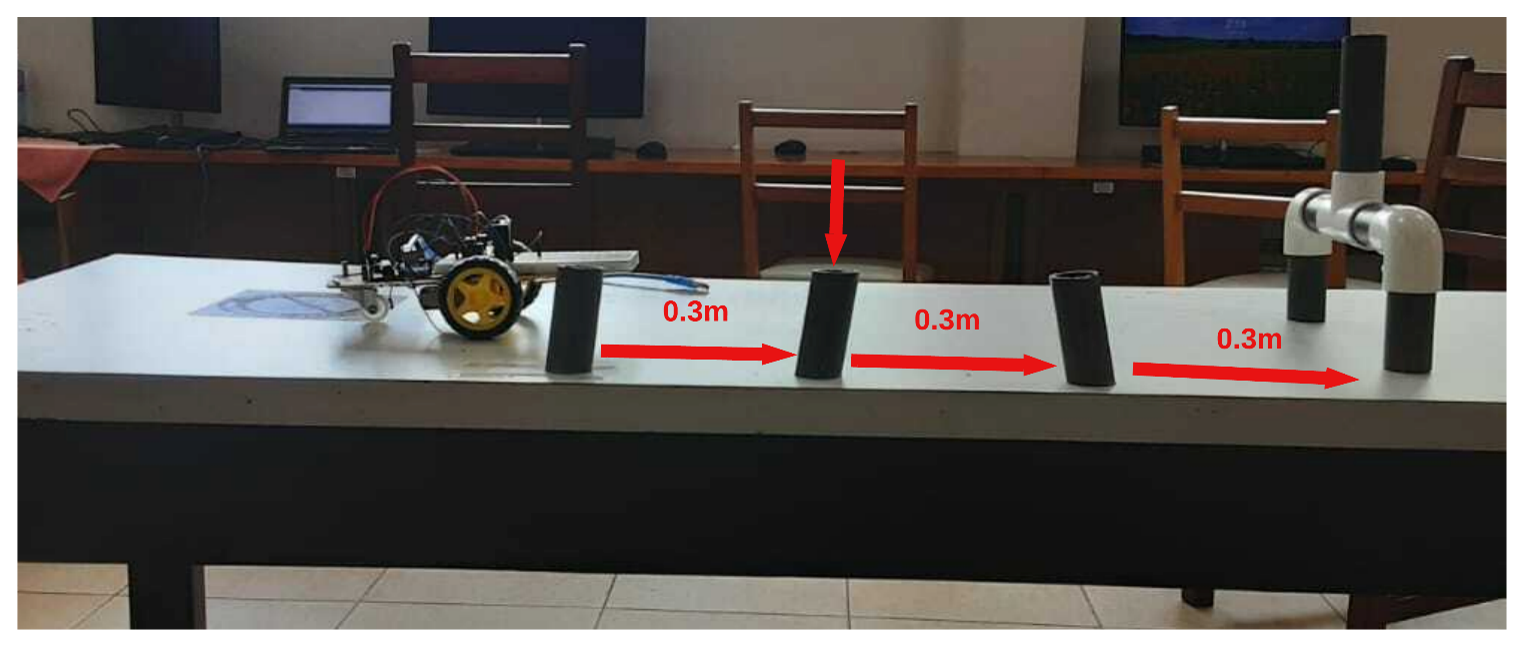
This project is a two-wheeled differential robot with linear movement, designed to trace various trajectories using kinematic models. The system was first modelled with Simulink in MATLAB prior to construction of the drive robot. Differential wheeled robots are mobile robots whose movement is based on two separately driven wheels placed on either side of the robot body. These robots can alter their direction by varying the relative rate of rotation of their wheels, eliminating the need for a separate steering motion.
This project is of particular importance in today's world due to its potential applications in industrial automation, navigation, and transportation. As an example, differential wheeled robots can be used for autonomous navigation and safe delivery of goods in warehouse and factory settings without the need for additional human supervision. In addition, the kinematic models utilized in this project can be applied to a variety of robotic systems, providing a powerful tool for automating complex tasks.
Plot

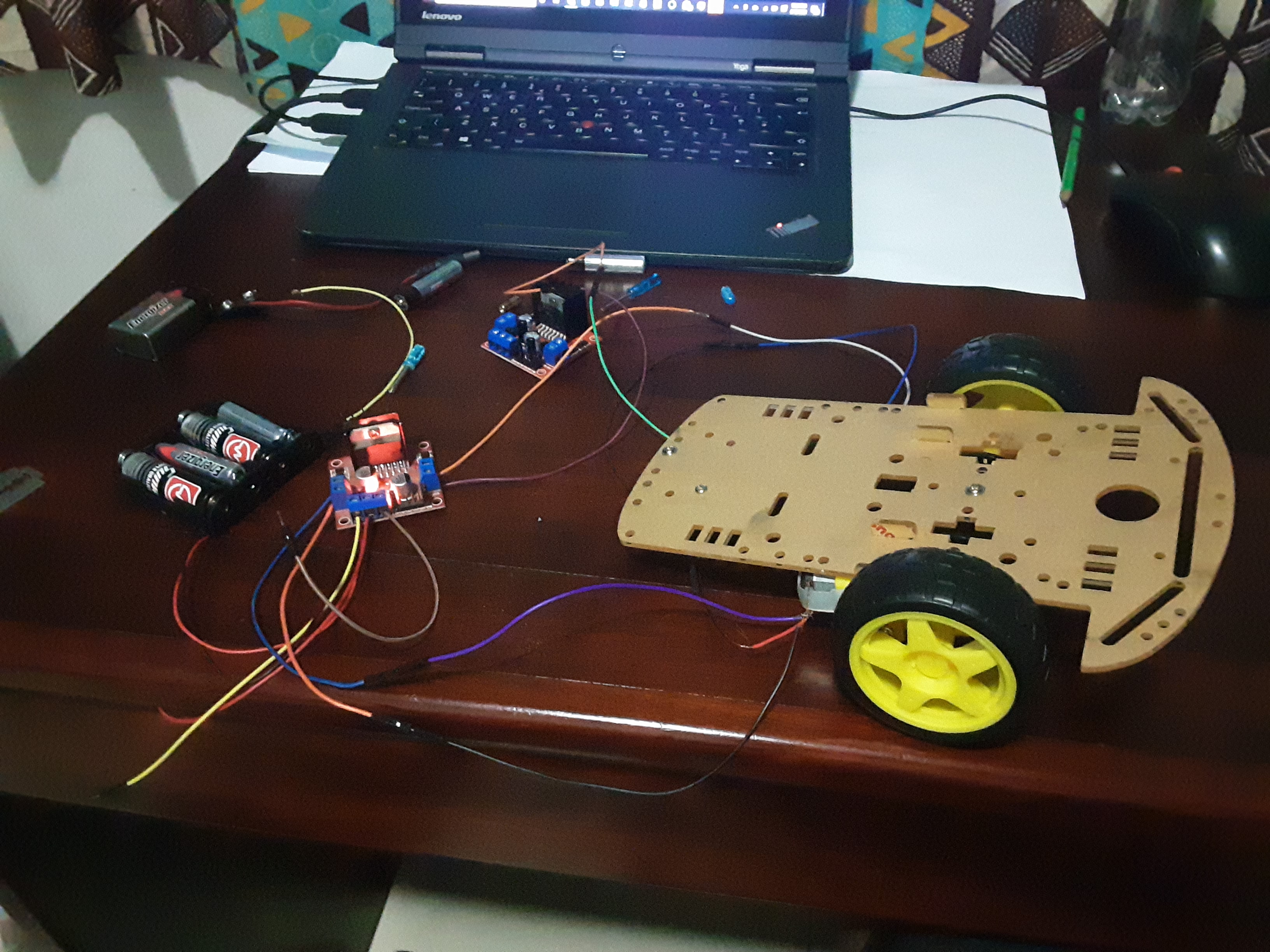
Build and Set Up